Робот-манипулятор для теплиц
Целью проекта okrobot является повышение урожайности растений за счет своевременного обнаружения отклонений от программы нормального развития растения, а также снижение влияния фактора нехватки рабочих рук.
Актуальность
Цикл развития некоторых насекомых до взрослых особей с крыльями 5 дней. Организация мониторинга здоровья растений традиционными методами даже с такой периодичностью создает нагрузку на фонд оплаты труда в тепличном овощеводстве, который, в зависимости от региона, может составлять от 20 до 50 % от себестоимости. Наш проект позволит снизить себестоимость осмотра растения для обеспечения периодичности исключающей возможность развития проблем, т.к. они, как и другие отклонения от нормального роста по заданному рецепту, будут обнаружены на ранних стадиях. На данный момент практически все оборудование для роботизации в теплицах импортное. Мы хотим представить российскую разработку робота, позволяющего автоматизировать процессы непрерывного мониторинга за растениями и сбора урожая в теплице.
Цифровизация мониторига и ухода за растениями
Объясняем за 20 минут подход на базе компьютерного зрения, роботизации и искусственного интеллекта

Сценарии использования робота
Мы разработали и протестировали 2 основный сценария использования робота-манипулятора
Мониторинг за растениями
Ежедневный мониторинг в теплице позволяет получать данные о состоянии растений и обычно проводится агрономом, требуя значительных временных затрат. С целью повышения качества и стабильности мониторинга за растениями был разработан прототип робота позволяющий автоматизировать данный процесс.
Конечной целью разработки робота является возможность проведения осмотра растений, определение внешних признаков заболеваний на ранней стадии, достаточности питания наличия вредителей, а также отслеживания количества и размера плодов для прогнозирования урожая.
Конечной целью разработки робота является возможность проведения осмотра растений, определение внешних признаков заболеваний на ранней стадии, достаточности питания наличия вредителей, а также отслеживания количества и размера плодов для прогнозирования урожая.
Сбор плодов
Сбор урожая в теплицах требует усилий большого числа рабочих. Кадровый дефицит и растущие затраты на организацию непрерывной работы сборщиков (найм, проживание, питание, логистика) создают условия в которых формируется спрос на роботизацию сбора урожая.
Автоматизация процесса сбора снижает издержки на организацию ручного труда, создает рабочие места для высококвалифицированных инженеров и IT специалистов и в конечном итоге снижает себестоимость получаемой продукции.
Автоматизация процесса сбора снижает издержки на организацию ручного труда, создает рабочие места для высококвалифицированных инженеров и IT специалистов и в конечном итоге снижает себестоимость получаемой продукции.
Что получит заказчик


Возможность автономной установки системы роботизированного мониторинга растений на площадке заказчика или покупка услуги мониторинга с облачными вычислениями

раннее выявление проблем у отдельно взятого растения (визуальные признаки заболеваний, вредители, нарушения питания)

Отслеживание отклонения растений от норм (листовая поверхность, количество плодов) для контроля хода выполнения работ в теплице
ежедневные данные об урожайности
автоматизация процесса сбора плодов с возможностью задать параматры сбора (размер, вес)
снижение себестоимости продукции
Мониторинг производится в трех измерениях
Съемка растений производится в 2Д и 3Д проекциях, что позволяет точно оценивать объемные характеристки листов, плодов, стеблей, а также цветовые характеристики растений
Мониторинг за растениями

Реализация
Нами разработан прототип робота оснащенного камерой высокого разрешения и лидаром, который передвигается по рельсам и делает серию снимков растения с разных ракурсов, далее данные передаются на облачный сервер, где производится их обработка и создание трехмерной модели растения.
Полученные нами 3д модели растений имеют высокую точность детализации (менее 0.5 мм), и позволяют успешно реконструировать даже сложные конфигурации наиболее мелких элементов – листьев и стеблей. Такая точность является избыточной, что дает возможность дальнейшей оптимизации и удешевления конструкции.
Полученные нами 3д модели растений имеют высокую точность детализации (менее 0.5 мм), и позволяют успешно реконструировать даже сложные конфигурации наиболее мелких элементов – листьев и стеблей. Такая точность является избыточной, что дает возможность дальнейшей оптимизации и удешевления конструкции.
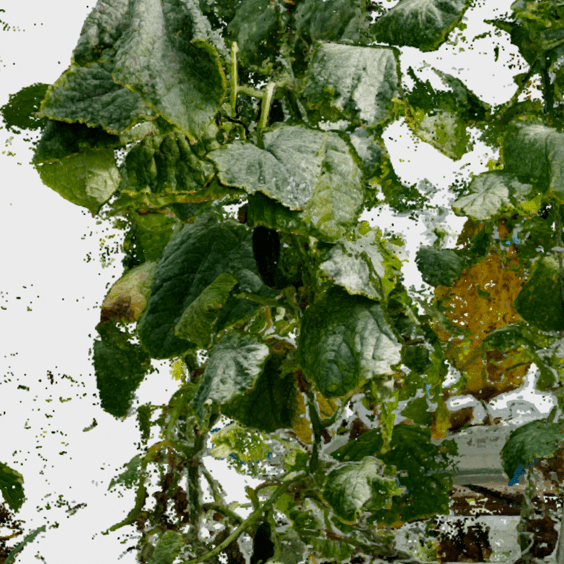
на фото показаны 3д модели растений
Благодаря искусственному интеллекту у каждого растения могут распознаваться стебель, листья, плоды. Для листьев можно определить площадь и цветовое распределение, для стебля – диаметр и длину, а для плодов – размер, цвет.
Анализ таких данных в динамике дает полную картину о состоянии растений и позволяет максимизировать производительность теплицы.
Ежедневный мониторинг позволит значительно сократить объем применяемых средств защиты растений, рационально изменять пропорции питательных смесей, строить оптимальные маршруты сбора плодов для манипулятора-сборщика и еще много новых сценариев, которые будут сформулированы по результатам анализа обратной связи от тестовой эксплуатации.
Анализ таких данных в динамике дает полную картину о состоянии растений и позволяет максимизировать производительность теплицы.
Ежедневный мониторинг позволит значительно сократить объем применяемых средств защиты растений, рационально изменять пропорции питательных смесей, строить оптимальные маршруты сбора плодов для манипулятора-сборщика и еще много новых сценариев, которые будут сформулированы по результатам анализа обратной связи от тестовой эксплуатации.
Роботизация мониторинга за растениями и сбора урожая для вашей теплицы
Сбор урожая
Реализация
Для этого нами были разработаны:
1. Конструкция прототипа робота, система направляющих и приводов, система управления роботом
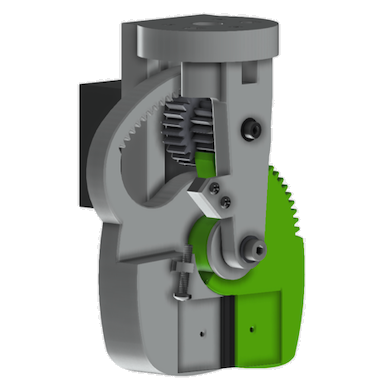
2. Конструкция захвата для среза и удержания плодов
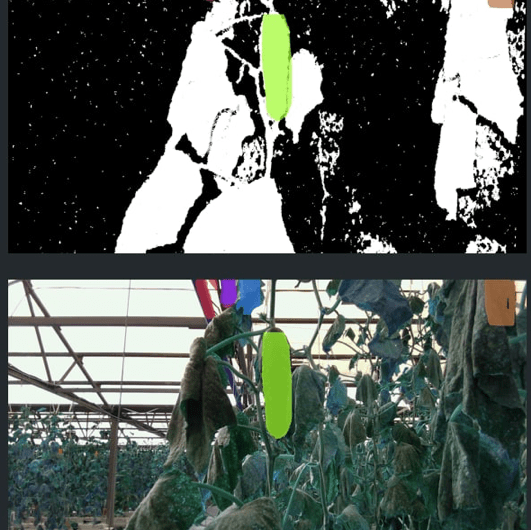
на фото: - конструкция захвата для среза и удержания плода со сменными лезвиями- нейронная сеть определяет плоды в цветном снимке и матрице глубины
Для навигации и сбора плодов была разработана система компьютерного зрения на базе нейросети, позволяющая распознавать плоды огурцов в цветных снимках с камеры. Также был создан аналитический алгоритм определения точки среза плода в пространстве. Ниже показаны промежуточные результаты вычислений для процесса наведения и сбора каждого плода.
Проведенные в теплице испытания данного прототипа продемонстрировали реализуемость функции автоматического сбора плодов.
Сбор огурцов
На видео прототип робота определяет местоположение огурца в пространстве, срезает плодоножку, захватывает огурец и переносит его в контейнер

Преимущества для бизнеса
Сокращение затрат
Сокращение затрат на питание растений, СЗР вследствие точечного применения у отдельно взятых растений

Сокращение потерь урожая
Своевременная реакция на проблемы у растения позволяет минимизировать потери урожая

Удешевление сбора урожая
Снижение издержек на организацию непрерывного сбора урожая (найм, проживание, питание рабочих)

Прогнозирование объема урожая
Мониторинг позволяет ежедневно получать данные о количестве и весе плодов

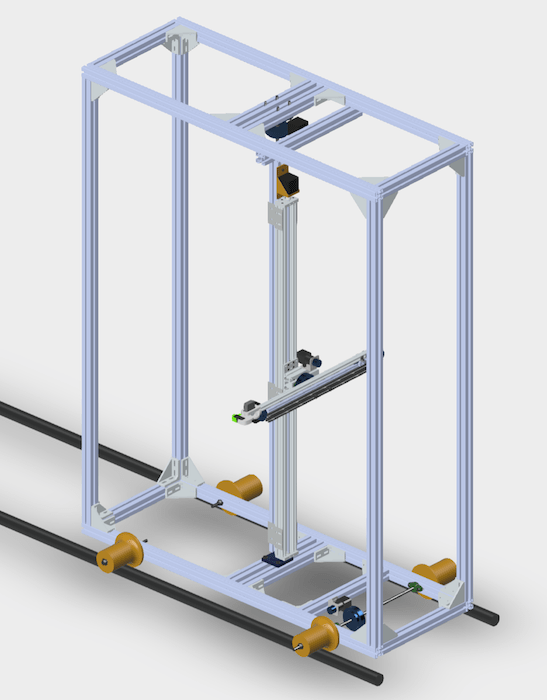
Конструкция робота-манипулятора
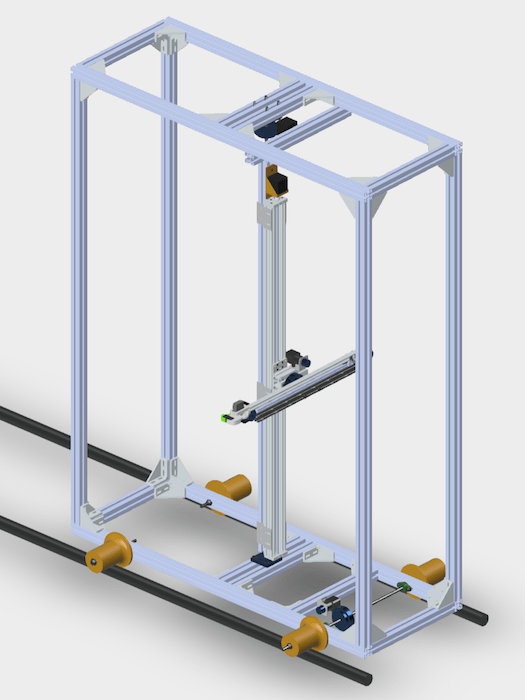
Конструкция робота-манипулятора
Разработана модель робота-манипулятора из доступных в России и Китае компонентов. Робот самостоятельно передвигается по труборельсам, работает на уровне до 1.5м по высоте, умеет срезать и захватывать плод под разными углами. Прототип робота оснащен камерой высокого разрешения и лидаром.
Этапы разработки робота-манипулятора
Завершено
Разработка робота
Прототип робота, самостоятельно передвигающийся по рельсам, оснащенный камерой высокого разрешения, лидаром и манипулятором для захвата и среза огурца
Завершено
Разработка ПО
Система компьютерного зрения на базе искусственного интеллекта и система управлением роботом-манипулятором
Завершено
Тестирование
Прототип успешно прошел тестирование в действующей
теплице с огурцами. Протестированы сценарии: 3д сканирование растений и сбор плодов
теплице с огурцами. Протестированы сценарии: 3д сканирование растений и сбор плодов
В процессе
Оптимизация
Оптимизация работы модуля 3д сканирования и физических параметров производительности робота для сбора плодов